ARTÍCULO ORIGINAL:
DAVINCI Y CIRUGÍA COLORRECTAL: CURVA DE APRENDIZAJE EN UN HOSPITAL DE CASTILLA Y LEÓN
José Felipe Reoyo Pascual, Nerea Muñoz Plaza, Xandra Valero Cerrato, Evelio Alonso Alonso, Cristina González Prado, Raquel León Miranda, Luciano Ferrando, Miguel Álvarez Rico
Servicio de Cirugía Gral y Apto. Digestivo Hospital Universitario de Burgos.
Rev Acircal. 2024; 10 (1):44-49
Palabras clave: Cirugía, robótica, colorrectal, laparoscopia.
Descargar artículo en PDF
INTRODUCCIÓN
En los últimos años, la implementación de la cirugía robótica en el campo de la cirugía colorrectal ha crecido de manera exponencial. La Sanidad de Castilla y León no se ha mostrado ajena y ha incorporado sistemas robóticos en sus hospitales sumándose así a la corriente nacional de utilización de esta técnica. Pero como toda nueva técnica, precisa de una curva de aprendizaje, distinta para cada técnica quirúrgica,con el añadido del manejo de tecnología muy sofisticada.
MATERIAL Y MÉTODOS
El objetivo de nuestro estudio es analizar la curva de aprendizaje y los resultados de un cirujano colorrectal especialista en cirugía laparoscópica colorrectal en un hospital terciario aprovechando la incorporación del robot DaVinci Xi desde el año 2018. Asimismo se reflexionará sobre el papel de la cirugía robótica en nuestra especialidad. La curva de aprendizaje se definió con un mínimo de 20 procedimientos robóticos realizados por el mismo cirujano.
Para alcanzar este objetivo se planteó un análisis retrospectivo descriptivo de los datos recogidos de manera prospectiva. Los criterios de inclusión fueron todas aquellas cirugías colorrectales robóticas realizadas durante el periodo de Enerode 2021 hasta Enero de 2022 por el mismo cirujano colorrectal con el certificado de cirujano de consola otorgado por Abex.
Durante los 12 meses que duró nuestro estudio se completaron un total de 35 pacientes, correspondiendo el 69% al sexo masculino. La edad media fue de 66 años con una desviación de 9,56 años y rango de edad 43-81 años.. El IMC medio fue de 25,98 kg/m2. el ASA II fue el más repetido, con un 60% de los pacientes, seguido de ASA III con un 26% y un 14% para ASA I. Todas las intervenciones que se realizaron fueron por patología oncológica. El 69% de los pacientes con neoplasia de recto han recibido neoadyuvancia.
Los tipos de intervenciones quirúrgicas que se realizaron fueron principalmente resección anterior baja (40% de los casos), sigmoidectomía (40% de los casos), amputación abdominoperineal (14% de los casos) y hemicolectomía izquierda (6%).
La media de distancia del tumor al margen anal fue de 12 cm con un rango (1-60 cm). Los ganglios analizados en el espécimen quirúrgico varió en función de la intervención quirúrgica realizada, esta variación se situó de 10 a 26 ganglios. El tiempo medio de intervención quirúrgica fue de 179 minutos con una desviación de 37 minutos. El tiempo de intervención difirió entre los tipos de intervención quirúrgica realizada, siendo la amputación abdominoperineal la que requirió mayor tiempo quirúrgico con una media de 200 minutos. Este quirúrgico mostró una curva descendente según se avanzaba en la curva de aprendizaje. El tiempo medio de preparación o tiempo de docking se situó en 20 minutos, presentado un descenso paulatino conforme se avanzaba en la curva de aprendizaje. El tiempo de cirugía robótica caracterizado por la cirugía en la consola también mostró una curva descendente conforme se avanzaba en los procedimientos. Se precisó de convertir a cirugía abierta a 2 pacientes por adherencias intestinales que dificultaban mucho la técnica. La estancia hospitalaria presentó una mediana de 5 días con un rango de 4 días a 43 días. La dieta oral así como la deambulación se inició en el primer día postoperatorio Las complicaciones fueron: 1 fuga anastomótica (0,03%) e iíleo paralítico (6%).
DISCUSIÓN:
A la vista de los resultados obtenidos podemos evidenciar en primer lugar y como es lógico que a medida que vamos avanzando en la curva de aprendizaje se reduce considerablemente tanto el tiempo de docking que pasó de ser inicialmente de 38 minutos a apenas llegar a 17 minutos en el caso número 35 como por otro lado el tiempo de consola que también se ve reducido con el transcurso de los pacientes aunque no a un nivel tan llamativo como en el tiempo de docking.
En segundo lugar, los datos clínicos de estancia, dolor postoperatorio, complicaciones etc, a grandes rasgos, no muestran de entrada una gran diferencia con respecto a la laparoscopia convencionalde forma observacional y grosso modo (no hemos diseñado un estudio comparativo laparoscopia vs robótica). Por tanto, pensamos que durante la curva de aprendizaje quizás más que observarse unos beneficios clínicos llamativos lo que se consigue obviamente es un manejo del sistema robótico que permitirá a medida que aumente la casuística y complejidad obtener probablemente verdaderos beneficios para el paciente. Subjetivamente los cirujanos robóticos destacan la visión , la ergonomía y la facilidad para ejecutar maniobras como la sutura intracorpórea que en laparoscopia implica mayor dificultad. Todos estos aspectos se han podido comprobar en nuestra serie y son un punto a favor en la utilización del robot en nuestras cirugías.
Quizá como punto negativo resulte que en nuestro centro no disponemos de un Comité de Cirugía Robótica en activo que permita mejorar la comunicación entre los servicios quirúrgicos implicados, crear rutinas y sistematizar protocolos asi como redistribuir los quirófanos disponibles de la forma más eficiente posible…puntos clave para estimular a los cirujanos a su utilización, reducir costes, errores previsibles y tiempo quirúrgico.
Las teóricas ventajas de la cirugía robótica aplicada al campo colorrectal son la mejoría en la realización del grapado y sección del cabo distal favoreciendo cirugía conservadora de esfínteres, así como la sutura intracorpórea 1,2,3. En cuanto al aspecto de la sección distal sí hemos podido comprobar una mayor facilidad para su realización disminuyendo la necesidad de aplicar segundas o sucesivas cargas en el recto. En cuanto a la sutura intracorpórea, como comentamos anteriormente, aunque no ha sido realizada de forma rutinaria en nuestras cirugías al tratarse de patología sigmoidea y rectal donde la norma es la anastomosis mecánica, las suturas puntuales practicadas sí han podido confirmar la optimización y refinamiento conseguido con el sistema robótico en cuanto al manejo de la aguja y realización del anudado 4,5.Tal y como puede observarse en la siguiente tabla, resumimos los aspectos que a la luz de nuestra curva de aprendizaje, consideramos beneficiosos o puntos a mejorar:
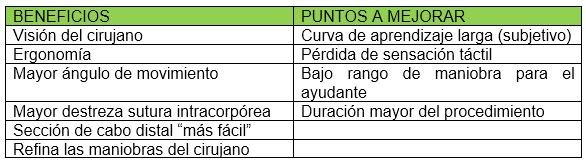
Tabla I. Comparación beneficios/puntos mejorables de nuestra experiencia
Quizá como punto negativo, en nuestro centro no disponemos de un Comité de Cirugía Robótica en activo que permita mejorar la comunicación entre los servicios quirúrgicos implicados, crear rutinas y sistematizar protocolos, así como redistribuir los quirófanos disponibles de la forma más eficiente posible…puntos clave para estimular a los cirujanos a su utilización, reducir costes, errores previsibles, etc..
MENSAJES FINALES
A la vista de nuestros resultados, es difícil dar una conclusión acerca de la utilización del robot en cirugía colorrectal ya que por una parte mejora considerablemente la visión del campo quirúrgico y maniobras complejas, pero por otra, en nuestra serie, no hemos observado con claridad una gran mejoría, al menos desde el punto de vista global, con respecto a los pacientes intervenidos por vía laparoscópica convencional.
En relación a la curva de aprendizaje se ha de intentar se ejecute en el menor tiempo posible para no alargar los tiempos y ralentizar la adquisición de destreza con el sistema. En nuestra opinión, una vez superada, será cuando el cirujano colorrectal detecte los potenciales beneficios del sistema robótico y se puedan reflejar en resultados clínicos.
La creación a nivel hospitalario de un comité de cirugía robótica es imprescindible para fomentar su desarrollo y optimizar los recursos disponibles.

Fig. 1. Sistema de cirugía robótica…Cirujano consola y robot.
BIBLIOGRAFIA
- Beltzer C, Knoerzer L, Bachmann R et al. Robotic versus laparoscopic sigmoid resection for diverticular disease: A single-center experience of 106 cases. J Laparoendosc Adv Surg Tech A 2019; 29 (11): 1451-1455.
- Ramage L, Georgiou P, Tekkis P et al. Is robotic ventral mesh rectopexy better than laparoscopy in treatment of rectal prolapse and obstructed defecation? A meta-analysis. Techniques in Coloproctology 2015; 19 (7): 381-389.
- Van Lersel JJ, de Witte CJ, Verheijen PM et al. Robot-assisted sacrocolporectopexy for multicompartment prolapse of the pelvic floor: a prospective cohort study evaluating functional and sexual outcome. Dis Colon Rectum 2016; 59 (10): 968-974
- Elliott PA, McLemore EC, Abbass MA et al. Robotic versus laparoscopic resection for sigmoid diverticulitis with fistula. J Robotic Surg 2015; 9 (2): 137-142.
- Bilgin IA, Bas M, Benlice C et al. Totally laparoscopic and totally robotic surgery in patients with left-sided colonic diverticulitis. Int J Med Robot 2020; 16 (1): e2068